# Power Transmission
Power transmission systems are essential components in robotics that transfer mechanical energy from motors to various moving parts. Here's an overview of key power transmission mechanisms used in robotics:
### 1. Key and Keyway
A key is a machine element used to connect a rotating component (such as a gear or pulley) to a shaft. This connection:
* Prevents relative rotation between the shaft and the mounted component
* Enables efficient torque transmission
* May still allow axial movement along the shaft
The complete system consists of:
* **Key**: Usually a rectangular piece of steel that fits into matching slots
* **Keyway**: The slot cut into the shaft
* **Keyseat**: The corresponding slot in the hub of the mounted component
* **Keyed joint**: The complete assembly of these components
Different types of keys include:
* **Parallel Keys**: Square or rectangular keys that run along the shaft length
* **Woodruff Keys**: Semicircular keys inserted into curved slots in the shaft
* **Taper and Gib-head Keys**: Used for heavy, unidirectional, reversing, and vibrating torques
* **Feather Keys**: Square parallel keys with curved ends of fixed radius
### 2. Gear Trains
Gear trains transfer rotational motion between shafts using meshed gears. They offer precise control of speed and torque, making them ideal for robotics applications.
Types of gear trains include:
* **Simple gear train**: Basic arrangement with gears on parallel shafts
* **Compound gear train**: Multiple gears on intermediate shafts, allowing for larger velocity ratios
* **Epicyclic (planetary) gear train**: Complex arrangement with a central sun gear, planet gears, and an outer ring gear
Gear trains in robotics enable:
* Precise speed control
* Torque multiplication
* Direction changes
* Compact power transmission
### 3. Chain and Sprockets

Chain and sprocket systems transfer rotational motion between distant shafts using a toothed wheel (sprocket) and a chain. The sprocket teeth mesh with the chain links to transmit power without slippage.
Key components:
* **Sprocket**: Toothed wheel that engages with the chain
* **Chain**: Series of connected links that transfer power
Applications in robotics include:
* Power transmission over longer distances than gears
* Situations requiring consistent speed ratios
* Robotic arms and manipulators
* Mobile robot drive systems
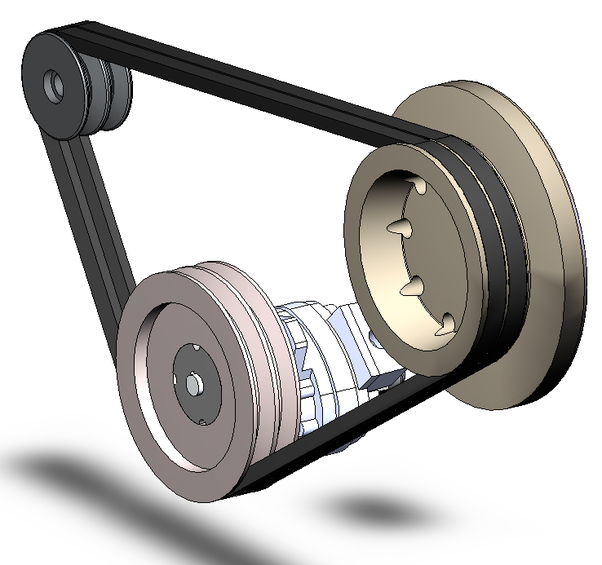
### 4. Belt Drives
### V-Belts
V-belts have a trapezoidal cross-section that fits into matching grooved pulleys. They offer several advantages:
* Better grip and traction than flat belts
* Higher power transmission efficiency
* Increased load-carrying capacity
* Reduced noise and vibration
* Less slippage under load
V-belts are commonly used in robotics applications requiring moderate power transmission with some flexibility in alignment.
### Timing Belts
Timing belts (also called synchronous belts) feature teeth molded onto their inner surface that mesh with grooved pulleys. They combine the flexibility of belt drives with the precision of gear systems.
Advantages of timing belts in robotics:
* No slippage, ensuring precise synchronization
* Maintenance-free operation (no re-tensioning required)
* High efficiency (98-99%)
* Quieter operation than chains
* Clean operation without lubrication
Each power transmission method has specific advantages and applications in robotics, with the choice depending on factors like required precision, load characteristics, space constraints, and maintenance considerations.
---
# Agent Instructions: Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://panav.gitbook.io/robotics-handbook/common-mechanisms/power-transmission.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.